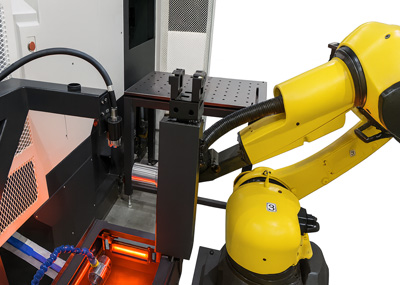
u 关节式机器人
特点
l
结构:多关节设计(通常六轴或以上),高灵活性,运动范围广,可执行复杂路径。
l
速度与负载:适合高速度与高负载作业。
l
安全性:运作时力量大、速度快,需要设置安全护栏或隔离区域。
应用
l
重工业生产线,如汽车制造、金属焊接、喷涂与重型物料搬运。
l
适合长时间、高效率自动化操作。
u 协作式机器人
特点
l
结构:小体积、多关节设计(通常六轴或七轴),结构紧凑,适合在工作人员周围灵活作业。
l
速度与负载:适合低负载、轻量作业。
l
安全性:内建碰撞感测器与力矩限制,可设定虚拟边界,人机接触时即时停机。
应用
l
轻工业与电子制造,如电子装配、包装、上下料等作业。
l
适合与人协同作业,弹性生产与多样化任务。